°°°°2005ƒÍÈ_ º���£¨Œ“᯵ƒ∞l(f®°)Îä––òI(y®®)±„√Ê≈R√∫ªƒåß(d®£o)÷¬µƒÎ䪃°£»ÁΩÒ��£¨√∫ÎäéßÅ̵ƒ≠h(hu®¢n)æ≥Œ€»æ�°¢»´«Ú◊É≈Ø“‘º∞Œ“á¯≥–ì˙(d®°n)µƒúp≈≈»ŒÑ’(w®¥)∂º∆» πŒ“ÇɱÿÌö姫ÛΩ‚õQÎä‘¥¿ßæ÷÷Ƶ¿£¨’{(di®§o)’˚ƒÐ‘¥ΩY(ji®¶)òã(g®∞u),Éû(y®≠u)œ»∞l(f®°)’πÔL(f®•ng)Îä����°¢Ã´ÍñƒÐ∞l(f®°)Îä∫Õ…˙ŒÔŸ|(zh®¨)ƒÐ∞l(f®°)Îä «¨F(xi®§n)ΩÒºº–g(sh®¥)ólº˛œ¬µƒ◊Óº—þxìÒ����°£±æ∆¨∞∏¿˝ «ûÈôÍñƒÐπ‚∑¸Îä≥ÿ∏≤…w‰ìªØ≤£¡ß∞¡˜ÀÆæÄ◊˜òI(y®®)¥Úø◊�����£¨‘O(sh®®)ljº”π§æ´∂»����£¨–߬ “™«Û∏þ��£¨‘⁄≤ªΩµµÕ–‘ƒÐµƒ«∞÷œ¬����£¨◊Ó¥Û≥Ã∂»µƒøÿ÷∆¡À≥…±æ°£
°°°°1 ‘O(sh®®)lj∏≈õr
°°°°»´◊‘Ñ”≤£¡ß¥Úø◊ôC(j®©)∞¸∫¨6ÓwÀ≈∑˛��°¢∂®ŒªðS���°¢X1º∞X2ÀÕ¡œðS��°¢YðS����°¢Z1ðS°¢Z2ðS����°£æþÛw»ÁàD1À˘ æ°£
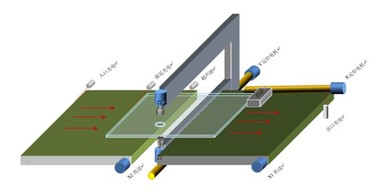
°°°°àD1 »´◊‘Ñ”¥Úø◊ôC(j®©) æ“‚àD
°°°��°£®1£©∂®ŒªðS£∫þx”√≤£¡ßæ´¥_∂®Œª£®B2À≈∑˛*1£©�����£¨Ωõ(j®©ng)úpÀŸôC(j®©)∫Û”…Ωz∏Ðǘє��°£”ã(j®¨)À„¥Úø◊¸c(di®£n)µΩ≤£¡ßþÖ—ÿæýÎx����£¨∂®ŒªµΩŒª÷√∫Û£¨∑≈œ¬?li®¢n)ıâK���£¨åç(sh®™)¨F(xi®§n)≤£¡ß∞µƒæ´¥_∂®Œª���£ª
°°°°£®2£©XðS£∫≤£¡ßǘÀÕ£®B2À≈∑˛*2£©��£¨Ωõ(j®©ng)úpÀŸôC(j®©)∫Û÷±Ω”Úå(q®±)Ñ”°£∏þƒ¶≤¡¡¶Ç˜ÀÕéß���£¨Õ¨ïr≈‰∫œâ∫äA—b÷√�£¨±£◊C≤£¡ß∞ÂǘÀÕ∑ΩœÚ����£¨Ç˜ÀÕéßµƒŒª÷√∫ÕÀŸ∂»”…«∞∫ÛÉ…ÇÄÀ≈∑˛øÿ÷∆£¨Õ®þ^”ã(j®¨)À„¥Úø◊¸c(di®£n)µΩ≤£¡ßþÖæⵃŒª÷√�£¨Ç˜ÀÕéß∂®ŒªµΩå¶ë™(y®©ng)¬∑èΩŒª÷√£ª
°°°��°£®3£©YðS£∫¥Úø◊„@Ó^∂®Œª£®A2À≈∑˛*1£©���£¨Ωõ(j®©ng)úpÀŸôC(j®©)∫Û”…Ωz∏Ðǘє°£„@Ó^∞≤—b‘⁄YðS…œ����£¨∏˘ì˛(j®¥)Y◊¯òÀ(bi®°o)¸c(di®£n)£¨”ã(j®¨)À„¥Úø◊¸c(di®£n)µΩ≤£¡ßþÖæⵃæýÎx�����£¨øÿ÷∆YðSµƒŒª÷√∫ÕÀŸ∂»µΩþ_(d®¢)÷∏∂®¥Úø◊¸c(di®£n)���£ª
°°°�°£®4£©Z1°¢Z2£∫„@Ó^þM(j®¨n)Ωo∂®Œª£®A2À≈∑˛*2£©��£¨Ωõ(j®©ng)”…¥Û–°ðܺ∞Ωz∏Ðǘє�����°£YðS∂®Œª∫Û�����£¨œ¬„@Ó^ð^∏þÀŸ∂»1Ω”Ω¸≤£¡ß±Ì√Ê����£¨‘Ÿ“‘ÀŸ∂»2þM(j®¨n)––æýÎx1µƒµπþÖ£¨‘Ÿ“‘ÀŸ∂»3þM(j®¨n)––æýÎx2π•þM(j®¨n)��£¨◊Ó∫Û“‘ÀŸ∂»4¬˝ÀŸÕÀµ∂�£ªœ¬„@Ó^ÕÀµ∂∫Û…œ„@þM(j®¨n)––≈cœ¬„@ÓêÀ∆µƒÑ”◊˜ÕÍ≥…¥Úø◊°£

°°°°àD2 XðSìıâK

°°°°àD3 YðSº∞ZðS
°°°°2 ºº–g(sh®¥)Ö¢îµ(sh®¥)
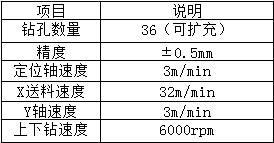
°°°°2.1 ‘O(sh®®)lj÷∏òÀ(bi®°o)
‘O(sh®®)lj÷∏òÀ(bi®°o)»Á±Ì1À˘ æ����°£
°°°°±Ì1 ‘O(sh®®)lj÷∏òÀ(bi®°o)
°°°°2.2 ”≤º˛«ÂÜŒ
°°°°”≤º˛«ÂÜŒ»Á±Ì2À˘ æ°£
°°°°±Ì2 ”≤º˛«ÂÜŒ
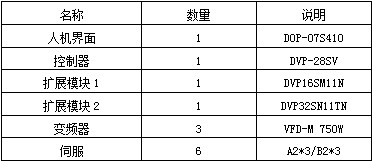
°°°°2.3 Ðõº˛«ÂÜŒ
°°°°Ðõº˛«ÂÜŒ»Á±Ì3À˘ æ��°£
°°°°±Ì3 Ðõº˛«ÂÜŒ

°°°°3 ðo÷˙π§æþ
°°°°ðo÷˙π§æþ»Á±Ì4À˘ æ°£
°°°°±Ì4 ðo÷˙π§æþ

°°°°4 π§Àá’f√˜
°°°°4.1 ∂®ŒªðS
°°°°∂®ŒªðS π”√B2À≈∑˛Úå(q®±)Ñ”�£¨øÿ÷∆…œ≤…”√Ω^å¶÷µ∂®ŒªDDRVA°£¥_∂®ª˘ú (zh®≥n)∫Û�����£¨≤…”√Ω^å¶÷µ∂®Œªø…“‘Ï`ªÓ∂®ŒªµΩ÷∏∂®Œª÷√���£¨±Ð√‚“ª∂®¡øµƒîµ(sh®¥)åW(xu®¶)”ã(j®¨)À„��£ªÆî(d®°ng)“ª¥Œ∂®ŒªÕÍ≥…��£¨È_ º¥Úø◊∫Û����£¨±„þM(j®¨n)––œ¬“ªÇÄø◊Œª÷√µƒ±»ð^��£¨»Áπ˚X◊¯òÀ(bi®°o)œýÕ¨Ñt≤ª–Ë“™‘Ÿ¥Œ∂®Œª���£¨X◊¯òÀ(bi®°o)≤ªÕ¨£¨ÑtþM(j®¨n)––œ¬“ª¥Œ∂®Œª����£¨∂®ŒªµΩŒª«∞∑≈œ¬?li®¢n)ıâK���£¨¬˝ÀŸþM(j®¨n)»ÎÓA(y®¥)∂®Œª÷√¥˝√¸£ª◊Ó∫Û“ªÇÄø’∂®ŒªÕÍ≥…∫Û�����£¨ ’∆ìıâK∂®Œª÷¡µ⁄“ªø◊Œª÷√��£¨µ»¥˝≤£¡ßÀÕ≥ˆ∫Û∑≈œ¬?li®¢n)ıâK����°£
°°°°4.2 YðS
°°°°YðS π”√A2À≈∑˛Úå(q®±)Ñ”£¨øÿ÷∆…œ≤…”√Ω^å¶÷µ∂®ŒªDDRVA�����°£“Ú?y®§n)ÈYðS…œ”–≤£¡ßäA≥÷â∫±P��£¨À˘“‘Y∂®ŒªªÚ÷ÿ–¬∂®Œª«∞â∫±P±ÿÌöΩ‚≥˝�£ªø◊µƒY◊¯òÀ(bi®°o)≈cœ¬“ªÇÄœÎÕ¨ïr£¨÷ª–Ë“™â∫±P�°¢â∫æo°¢∂®Œª∫ÕÀÕ¡œÑ”◊˜∫Û����£¨º¥ø…“‘¥Úø◊�°£
°°°°4.3 X1�°¢X2
°°°°X1°¢X2 π”√É…≈_B2À≈∑˛∑÷ÑeÚå(q®±)Ñ”���£¨øÿ÷∆…œ≤…”√‘ˆ¡ø Ω∂®Œª�£¨∑÷ÀÕ¡œ∫Û∫ÕÀÕ¡œ«∞É…≤ø∑ð���°£ÀÕ¡œþ^≥¨¬ï≤®∫Û���£¨X2≤ª–Ë“™Õ¨≤ΩÀÕ¡œ£¨þ@ïr“™∏þÀŸ—a(b®≥)¡œµΩ≥¨¬ï≤®«∞π‚Î䌪÷√�£¨“‘÷∏þπ§◊˜–߬ £ªÀÕ¡œµΩ≥¨¬ï≤®∫Û���£¨“‘“ª∞„ÀŸ∂»“∆Ñ”���£¨Æî(d®°ng)Ω”Ω¸÷¡“ª∂®æýÎxïr£¨‘Ÿ“‘¬˝ÀŸΩ”Ω¸--◊Ó∫ÛŸN…œìıâK����°£
°°°°4.4 Z1°¢Z2„@Ó^Œª÷√∂®Œª
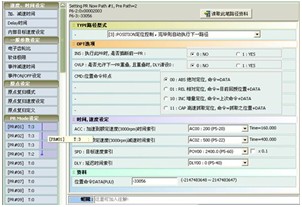
°°°°Z1�°¢Z2 π”√É…≈_A2À≈∑˛∑÷ÑeÚå(q®±)Ñ”£¨øÿ÷∆…œ≤…”√PR”|∞l(f®°)ÅÌøÿ÷∆„@Ó^Œª÷√��°£Œª÷√1£®6-03£©��£¨∏þÀŸ£®5-60£©Ω”Ω¸Œª÷√1�����£ªŒª÷√2£®6-05£©�����£¨ÀŸ∂»1£®5-61£©π•þM(j®¨n)1��£ªŒª÷√3£®6-07£©�£¨ÀŸ∂»2£®5-62£©π•þM(j®¨n)2£ªŒª÷√4£®6-09£©�£¨ÀŸ∂»3£®5-63£©ÕÀµ∂£ª“Ú?y®§n)È≤£¡ß∫Ò∂»≤ªÕ¨�����£¨≤ªÕ¨“?gu®©)∏Òµƒ≤£¡ßµƒ„@Ó^π•þM(j®¨n)1Œª÷√����£¨π•þM(j®¨n)2µƒŒª÷√–Ë“™þM(j®¨n)––’{(di®§o)’˚���£¨¥Àïr£¨å¶ë™(y®©ng)PR¬∑èΩÖ¢îµ(sh®¥)Õ®þ^Õ®”ç–Þ∏ƒ����£¨“‘ùM◊„º”π§–Ë«Û°£
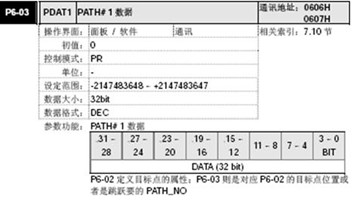
°°°°àD4 PRÖ¢îµ(sh®¥)
°°°°àD5 Õ®þ^Ðõº˛“é(gu®©)ÑùPR¬∑èΩ
°°°°Õ®þ^Delta ASDA-Soft “é(gu®©)ÑùPR¬∑èΩ����£¨ π”√Ω^å¶÷µ∂®Œª£¨“é(gu®©)Ñùº”ÀŸ∫ÕúpÀŸïrÈg“‘º∞ƒøòÀ(bi®°o)ÀŸ∂»À˜“˝�����£ª–Ë“™–Þ∏ƒ¬∑èΩïr�����£¨Õ®þ^Õ®”ç–Þ∏ƒå¶ë™(y®©ng)¬∑èΩµƒÖ¢îµ(sh®¥)£®¿˝»Á06-03å¶ë™(y®©ng)¬∑èΩ1µƒŒª÷√√¸¡ÓDATA£©��°£
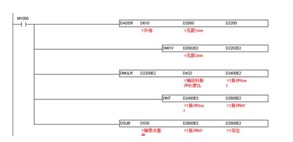
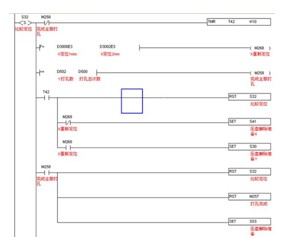
°°°°5 π§Àᡘ≥ÃàD
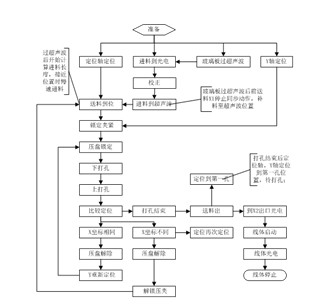
°°°°àD6 π§Àᡘ≥ÃàD
°°°°‘⁄≥ÖڑO(sh®®)”ã(j®¨)÷–���£¨“Ú?y®§n)Èπ§Àᥩ≤±»ð^Ï`ªÓ����£¨À˘“‘þxìÒ≈_þ_(d®¢)≤ΩþM(j®¨n)≥ÖÚþM(j®¨n)––‘O(sh®®)”ã(j®¨)����£¨å¢’˚Ã◊‘O(sh®®)ljµƒÑ”◊˜þM(j®¨n)––ºö(x®¨)∑÷��£¨‘⁄√øÇÄ≤Ω÷–‘O(sh®®)”ã(j®¨)™ö(d®≤)¡¢µƒøÿ÷∆Ñ”◊˜���£¨þ@ò”ø…“‘∫Ð∫√µÿ÷∏þπ§◊˜–߬ £ª≥˝“‘…œ¡˜≥Ã÷–µƒπ¶ƒÐÕ‚�£¨‘O(sh®®)lj÷–þÄ”–ùôª¨π¶ƒÐ����°¢–Þ„@π¶ƒÐ����°¢–ޔܪ˘ú (zh®≥n)°¢¬˝ÀŸ«∞þM(j®¨n)�°¢¬˝ÀŸ∫ÛÕÀ��£¨þ@–©Ñ”◊˜“Ú?y®§n)Ȫ˘”⁄≤ΩþM(j®¨n)µƒÀº¬∑‘O(sh®®)”ã(j®¨)£¨À˘“‘ø…“‘Ï`ªÓµƒ¥©≤‘⁄≥ÖÚ÷–��°£
°°°°¿˝»Á��£¨Æî(d®°ng)∂®ŒªÀ≈∑˛ÎäôC(j®©)ÕÍ≥…◊Ó∫Û“ª¥Œ∂®Œª���£¨Õ¨ïr‘O(sh®®)ljÈ_ º¥Úø◊∫Û�£¨∂®ŒªÎäôC(j®©)–Ë“™∫ÛÕÀ“ª∂®æýÎx��£¨‘Ÿ∂®ŒªµΩµ⁄“ªÇÄø◊«∞“ª∂®Œª÷√�£¨µ»¥˝¥Úø◊ÕÍ≥…£¨»ª∫Ûå¢≤£¡ßÀÕ≥ˆ“ª∂®æýÎx∫Û����£¨‘Ÿ∞—∂®ŒªìıâK∑≈œ¬£¨◊Ó∫Û¬˝ÀŸøøΩ¸µ⁄“ªÇÄø◊µƒ∂®ŒªŒª÷√��°£þ@¿Ô“Ú?y®§n)È≤…”√≤ΩþM(j®¨n)≥ÖڑO(sh®®)”ã(j®¨)��£¨þ@≤ø∑÷≥Öڙö(d®≤)¡¢¡˜≥ÑO(sh®®)”ã(j®¨)����£¨–Œ≥…“ªÇÄå£ÈTµƒ¡˜≥Ãøÿ÷∆ªÿ¬∑�£¨æÕø…“‘∫лð“◊åç(sh®™)¨F(xi®§n)�����£¨”÷≤ªï˛”∞Ìë‘≠”–øÿ÷∆µƒþâð㡘≥Ã����°£
°°°°6 œµΩy(t®Øng)”≤º˛ΩY(ji®¶)òã(g®∞u)
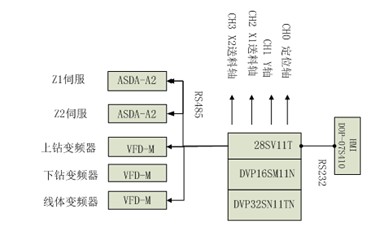
°°°°àD7 ΩY(ji®¶)òã(g®∞u) æ“‚àD

°°°°àD8 œµΩy(t®Øng)åç(sh®™)ÎH≤º÷√
°°°°¿˚”√28SVµƒ4¬∑200K∏þÀŸ√}õ_∑÷Ñeøÿ÷∆∂®ŒªðS���°¢YðS°¢X1ÀÕ¡œ����°¢X2ÀÕ¡œÀƒÇÄÀ≈∑˛£ªÕ¨ïr¿˚”√28SVµƒCOM2Õ®”çø⁄Õ®þ^485Õ®”ç�£¨≈cZ1°¢Z2þM(j®¨n)––Õ®”ç�����£¨–Þ∏ƒPRŒª÷√Ö¢îµ(sh®¥)∫ÕÀŸ∂»Ö¢îµ(sh®¥)�£ª≈c3≈_◊ÉÓl∆˜þM(j®¨n)––Õ®”磨–Þ∏ƒ◊ÉÓl∆˜µƒÓl¬ Ö¢îµ(sh®¥)��°£
°°°°7 HMIΩÁ√Ê

°°°°àD9 HMI
°°°°HMI ◊ÌìÔ@ æ¥Úø◊îµ(sh®¥)¡ø∫Õ‘O(sh®®)ljþ\(y®¥n)––ÝÓõr����°£‘O(sh®®)÷√ø◊îµ(sh®¥)∫Û£®¥_∂®ø◊æýÖ¢îµ(sh®¥)Õ®þ^∆‰À˚Ìì√ÊÕÍ≥…£©�£¨Õ®þ^øÿ÷∆πÒ√Ê∞Â∞¥‚oܢєÈ_ º¥Úø◊����°£

°°°°àD10 ‘O(sh®®)lj֢îµ(sh®¥)
°°°°‘⁄Ö¢îµ(sh®¥)‘O(sh®®)÷√ΩÁ√Ê£¨”√ëÙ‘O(sh®®)÷√∏˜ðSµƒôC(j®©)–µ—a(b®≥)Éîº∞ïrÈgÖ¢îµ(sh®¥)�£ª≤£¡ßÀÕ≥ˆæýÎx «Æî(d®°ng)≤£¡ßº”π§ÕÍÆÖ∫Ûå¢≤£¡ßÀÕ≥ˆµƒæýÎx£¨≤£¡ßÀÕ≥ˆ∫Û∂®ŒªðS≤≈ø…“‘‘Ÿ¥Œ∂®Œª�����£¨∑ÒÑt墑Ï≥…≤£¡ßµƒîDâ∫∫Õ∆∆ìp����°£

°°°°àD11 ø◊Ö¢îµ(sh®¥)‘O(sh®®)÷√1

°°°°àD12 ø◊Ö¢îµ(sh®¥)‘O(sh®®)÷√2
°°°°ø◊æý‘O(sh®®)∂®ø…∏˘ì˛(j®¥)√øÇÄ¥Úø◊Œª÷√æýÎx≤£¡ßþÖæⵃæýÎxÅÌ∂®Œª°£å¶”⁄ø◊µƒ‘O(sh®®)÷√����£¨“Ú?y®§n)È≤£¡ß÷ùuÀÕþM(j®¨n)≤¢È_ º¥Úø◊£¨¥Úø◊≤£¡ß≤ªƒÐ∫ÛÕÀ��£¨À˘“‘X◊¯òÀ(bi®°o)÷ª‘ˆ¥Û�����£¨≤ªï˛úp–°£∫ ��£ª∆‰÷–��£¨ «µ⁄n+1ÇÄø◊µƒX◊¯òÀ(bi®°o)�£¨ «µ⁄n∏Ëø◊µƒX◊¯òÀ(bi®°o)°£∂¯å¶”⁄X◊¯òÀ(bi®°o)‘O(sh®®)÷√≤ª∑˚∫œólº˛µƒ����£¨œµΩy(t®Øng)ï˛àÛ(b®§o)æØ≤¢≤ªƒÐþM(j®¨n)––¥Úø◊��°£
°°°°8 ’{(di®§o)‘á’f√˜
°°°°8.1 ∂®ŒªðSŒª÷√”ã(j®¨)À„
°°°°∂®ŒªðSŒª÷√”ã(j®¨)À„»Áœ¬£∫

°°°°∆‰÷–�£¨  ûÈ∂®ŒªðSΩ^å¶∂®Œª√}õ_îµ(sh®¥)£ª
ûÈ∂®ŒªðSΩ^å¶∂®Œª√}õ_îµ(sh®¥)£ª ûȪ˘ú (zh®≥n)√}õ_îµ(sh®¥)����£ª
ûȪ˘ú (zh®≥n)√}õ_îµ(sh®¥)����£ª  «ôC(j®©)–µ∆´“∆£¨∂®Œª”–∆´≤ÓïrÕ®þ^‘ìÖ¢îµ(sh®¥)–Þ’˝����£ª
«ôC(j®©)–µ∆´“∆£¨∂®Œª”–∆´≤ÓïrÕ®þ^‘ìÖ¢îµ(sh®¥)–Þ’˝����£ª  Ñt «X∑ΩœÚø◊æýÎx≤£¡ßþÖæâæýÎx£¨å¶ë™(y®©ng)ø◊µƒX≥þ¥Á����£ª
Ñt «X∑ΩœÚø◊æýÎx≤£¡ßþÖæâæýÎx£¨å¶ë™(y®©ng)ø◊µƒX≥þ¥Á����£ª  ûÈ∂®ŒªðS√}õ_æýÎx±»ÜŒŒª√}õ_îµ(sh®¥)/mm�°£
ûÈ∂®ŒªðS√}õ_æýÎx±»ÜŒŒª√}õ_îµ(sh®¥)/mm�°£
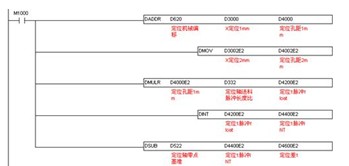
°°°°àD13 ∂®ŒªðSŒª÷√”ã(j®¨)À„ æ“‚àD
°°°°8.2 YðSŒª÷√”ã(j®¨)À„
°°°°YðSŒª÷√”ã(j®¨)À„»Áœ¬£∫

°°°°∆‰÷–����£¨  «∂®ŒªðSΩ^å¶∂®Œª√}õ_îµ(sh®¥)£ª
«∂®ŒªðSΩ^å¶∂®Œª√}õ_îµ(sh®¥)£ª «ª˘ú (zh®≥n)√}õ_îµ(sh®¥)��£ª
«ª˘ú (zh®≥n)√}õ_îµ(sh®¥)��£ª  «ôC(j®©)–µ∆´“∆�£¨∂®Œª”–∆´≤ÓïrÕ®þ^‘ìÖ¢îµ(sh®¥)–Þ’˝£ª
«ôC(j®©)–µ∆´“∆�£¨∂®Œª”–∆´≤ÓïrÕ®þ^‘ìÖ¢îµ(sh®¥)–Þ’˝£ª «Y∑ΩœÚ����£¨ø◊æýÎx≤£¡ßþÖæâæýÎx£¨å¶ë™(y®©ng)ø◊µƒY≥þ¥Á��£ª
«Y∑ΩœÚ����£¨ø◊æýÎx≤£¡ßþÖæâæýÎx£¨å¶ë™(y®©ng)ø◊µƒY≥þ¥Á��£ª  ûÈ∂®ŒªðS√}õ_æýÎx±»ÜŒŒª√}õ_îµ(sh®¥)/mm����°£
ûÈ∂®ŒªðS√}õ_æýÎx±»ÜŒŒª√}õ_îµ(sh®¥)/mm����°£
°°°°àD14 YðS”ã(j®¨)À„ æ“‚àD
°°°°8.3 ø◊Œª÷√—≠≠h(hu®¢n)±»ð^¥_∂®
°°°°X◊¯òÀ(bi®°o)‘⁄400mm~1500mm∑∂á˙É»(n®®i)“¿¥Œ‘ˆ¥Û‘O(sh®®)÷√£ªY◊¯òÀ(bi®°o)0mm~1500mm∑∂á˙É»(n®®i)»Œ“‚‘O(sh®®)÷√�£ª„@ø◊îµ(sh®¥)¡ø «36°£∂®ŒªµΩƒ≥ÇÄø◊µƒ◊¯òÀ(bi®°o)≤¢È_ º¥Úø◊�����£¨¥Àïr±»ð^Æî(d®°ng)«∞ø◊µƒX◊¯òÀ(bi®°o)≈cœ¬“ªÇÄø◊X◊¯òÀ(bi®°o) «∑ÒœýÕ¨°£œýÕ¨ïr�£¨∂®ŒªðS±£≥÷≤ªÑ”£¨YðS÷ÿ–¬∂®Œª∫Û¥Úø◊�£ª≤ªÕ¨ïr£¨∂®Œª“∆Ñ”÷¡œ¬“ª∂®ŒªŒª÷√�£ªÕ¨ïrY¥Úø◊ΩY(ji®¶) ¯∫Û±»ð^Æî(d®°ng)«∞ø◊µƒX◊¯òÀ(bi®°o)≈cœ¬“ªÇÄø◊X◊¯òÀ(bi®°o) «∑ÒœýÕ¨£¨∏˘ì˛(j®¥)±»ð^ΩY(ji®¶)π˚õQ∂® «∑Ò‘Ÿ¥ŒÀÕ¡œ≈c «∑Ò¿^¿m(x®¥)¥Úø◊�����£¨œýÕ¨ÑtYðS∂®Œª∫Û¥Úø◊���£ª≤ªÕ¨æÕÀÕ¡œµΩŒª���£¨YðS∂®Œª∫Û¥Úø◊����£¨É…ÇÄÑ”◊˜Õ¨ïrþM(j®¨n)––“‘÷∏þ–߬ °£

°°°°àD15 ø◊Œª÷√—≠≠h(hu®¢n)‘O(sh®®)∂®
°°°°8.4 πù(ji®¶)≈ƒøÿ÷∆
°°°°“Ú?y®§n)Èø◊µƒŒª÷√≤ª¥_∂®����£¨æÕ±ÿÌö‘O(sh®®)”ã(j®¨)“ªÇÄø…“‘åç(sh®™)ïr”ã(j®¨)À„◊¯òÀ(bi®°o)Œª÷√£¨Ï`ªÓïÞD(zhu®£n)‘⁄∂ýÇÄÑ”◊˜÷–�£ªÕ®þ^嶑O(sh®®)ljπ§Àá∑¥èÕ(f®¥)—–æø£¨¥_∂®É…ÇÄ÷ÿ“™µƒøÿ÷∆πù(ji®¶)≈ƒ£∫
°°°°£®1£©∂®ŒªðS∂®Œª�£¨“‘…œœ¬±Pâ∫æoïrôC(j®©)ûȪ˘ú (zh®≥n)£¨”ã(j®¨)À„¥Úø◊∂®Œª¥Œîµ(sh®¥)�����£ª
°°°���°£®2£©YðS∂®Œª���£¨“‘¥Úø◊ÕÍÆÖïrôC(j®©)ûȪ˘ú (zh®≥n)£¨”ã(j®¨)À„YðS∂®Œª¥Œîµ(sh®¥)��°£
°°°°àD16
°°°°E5=£®∂®Œª¥Œîµ(sh®¥)-1£©*2
°°°°Õ®þ^÷∏·òµƒ—≠≠h(hu®¢n)”ã(j®¨)À„����£¨Ï`ªÓµƒå¶Æî(d®°ng)«∞îµ(sh®¥)ì˛(j®¥)≈cœ¬“ªπPîµ(sh®¥)ì˛(j®¥)þM(j®¨n)––±»ð^°£◊˜ûȱ»ð^ΩY(ji®¶)π˚�£¨‘⁄Õ¨“ª≤ΩþM(j®¨n)≥ÖÚ÷–£¨ø…“‘ïÞD(zhu®£n)µΩ∂ýÇÄå¶ë™(y®©ng)µƒøÿ÷∆≤Ω÷–�����£ª“‘÷∏·òµƒ∑Ω Ω��£¨ø…“‘‘⁄“é(gu®©)Ñù“ªÇÄþB¿m(x®¥)µƒîµ(sh®¥)ì˛(j®¥)Ö^(q®±)”Ú∫Û£¨ÕÍ≥…“ª≈˙Ñ”◊˜‘O(sh®®)”ã(j®¨)�����°£
°°°°9 ΩY(ji®¶) ¯’Z
°°°°±æøÓ»´◊‘Ñ”îµ(sh®¥)øÿ¥Úø◊ôC(j®©)��£¨æþ”–»˝¥ÛÃÿ¸c(di®£n)��°£µ⁄“ª���£¨÷ÿèÕ(f®¥)µƒº”π§æ´∂»“™«Û∏þ£®–°”⁄0.5mm£©��£ªµ⁄∂˛�£¨∏°¸c(di®£n)îµ(sh®¥)þ\(y®¥n)À„¡ø¥Û�£ªµ⁄»˝£¨º”π§Ñ”◊˜Ï`ªÓ����£¨–Ë“™»·–‘µƒæé≥Ã�£¨–Ë“™þmïrÏ`ªÓµƒùM◊„øÕëÙµƒîU(ku®∞)≥‰–Ë«Û°£
°°°°ÅÌ‘¥”⁄≈_þ_(d®¢)À≈∑˛Úå(q®±)Ñ”∆˜µƒ∏þæ´∂»∫ÕSVøÿ÷∆∆˜èä(qi®¢ng)¥Ûµƒ∏°¸c(di®£n)îµ(sh®¥)þ\(y®¥n)À„ƒÐ¡¶����£¨∫Ð∫√µÿåç(sh®™)¨F(xi®§n)¡À≤£¡ß¥Úø◊º”π§÷–ø◊æý��°¢ø◊îµ(sh®¥)”ã(j®¨)À„���£ª¿˚”√E÷∏·ò∆´“∆£¨ø…“‘åç(sh®™)¨F(xi®§n)Ï`ªÓîU(ku®∞)≥‰ø◊îµ(sh®¥)����£¨œýýèÉ…ø◊Èg“¿¥Œ±»ð^µ»π¶ƒÐ£¨ø…“‘þ_(d®¢)µΩÏ`ªÓîU(ku®∞)≥‰¥Úø◊îµ(sh®¥)¡øµƒ»·–‘≥ÖڑO(sh®®)”ã(j®¨)“™«Û�����°£ΩË÷˙≈_þ_(d®¢)øÿ÷∆∆˜Ï`ªÓµƒ≤ΩþM(j®¨n)≥ÖڑO(sh®®)”ã(j®¨)����£¨ø…“‘Ãé¿Ìøÿ÷∆Ñ”◊˜µƒΩª≤Ê¡˜≥ã¨Ã·∏þ¡À≥ÖڑO(sh®®)”ã(j®¨)–߬ �����°£æC…œÀ˘ ˆ�����£¨‘ì‘O(sh®®)ljµƒøÿ÷∆æ´∂»∫Õπ§Àá“™«Û‘⁄––òI(y®®)É»(n®®i)埔⁄ð^∏þµƒÀÆ∆Ω��°£
°°°°¥ÀÕ‚£¨å¶”⁄øÕëÙπ§Àᵃ Ïœ§≥Ã∂»����£¨õQ∂®¡À’˚ÇÄøÿ÷∆¡˜≥õƒŸ|(zh®¨)¡ø£ª‘O(sh®®)ljµƒôC(j®©)–µΩY(ji®¶)òã(g®∞u)�£¨“≤÷±Ω””∞Ìë‘O(sh®®)ljµƒøÿ÷∆æ´∂»°£Æî(d®°ng)»ª�£¨œý±»∆‰À˚≥… ϵƒ◊‘Ñ”¥Úø◊‘O(sh®®)lj£¨‘ì‘O(sh®®)lj“≤”–≤ª◊„÷ÆÃé�£¨÷˜“™±Ì¨F(xi®§n)‘⁄£∫–£ú (zh®≥n)ø◊µƒŒª÷√≤…”√485Õ®”ç◊x»°À≈∑˛Œª÷√∑Ω ΩÀŸ¬ º∞∑Ä(w®ßn)∂®–‘µÕ£¨PLCµƒøÿ÷∆ÀŸ∂»ð^îµ(sh®¥)øÿµÕ�����£ªµ´ «œý±»îµ(sh®¥)øÿœµΩy(t®Øng)����£¨ π”√≈_þ_(d®¢)PLCø…“‘±£◊CÎäö‚øÿ÷∆≥…±æÕ∂»Îµ√µΩ”––ßµƒøÿ÷∆°£Õ¨ïr�����£¨≈_þ_(d®¢)–°–ÕPLCÏ`ªÓµƒøÿ÷∆≥ÖڑO(sh®®)”ã(j®¨)��£¨¥Û»ð¡ø≥ÖڥÊɶ��£¨ø…“‘ùM◊„”√ëÙ¥Û¡ø�����°¢èÕ(f®¥)Îsµƒ≥ÖڑO(sh®®)”ã(j®¨)����£¨Ωo”√ëÙéßÅÌÏ`ªÓµƒ‘O(sh®®)”ã(j®¨)ÛwÚû(y®§n)£¨Ûw¨F(xi®§n)¡À≈_þ_(d®¢)–°–Õøÿ÷∆∆˜èä(qi®¢ng)¥Ûµƒøÿ÷∆∫Õþ\(y®¥n)À„Ãé¿ÌƒÐ¡¶��£¨ÕªÔ@¡À≈_þ_(d®¢)HMIÆa(ch®£n)∆∑�����°¢À≈∑˛Æa(ch®£n)∆∑���°¢◊ÉÓl∆˜Æa(ch®£n)∆∑µƒ“◊”√–‘∫Õåç(sh®™)”√–‘�°£
°°°°◊˜’þ∫ÜΩÈ£∫
°°°°∏∂’—�����£¨≥ˆ…˙1984ƒÍ2‘¬�£¨ÆÖòI(y®®)”⁄—ý…Ω¥ÛåW(xu®¶)úyøÿºº–g(sh®¥)≈cÉx∆˜å£òI(y®®)°£¨F(xi®§n)»Œ÷–þ_(d®¢)ÎäÕ®π…∑ð”–œÞπ´Àæ…œ∫£ôC(j®©)ÎäòI(y®®)Ñ’(w®¥)Ãéë™(y®©ng)”√π§≥Ãéü���£¨èƒ ¬≈_þ_(d®¢)ôC(j®©)ÎäÆa(ch®£n)∆∑µƒ €«∞�����°¢ €÷–º∞ €∫Ûµƒ∏˜Ìó(xi®§ng)ºº–g(sh®¥)÷ß≥÷π§◊˜���°£